



ScreenShots:
Software Description:
Altair HyperWorks Solvers, is a collection offinite element and multibody dynamics solvers for structural,fluid-dynamics and systems simulation. These solvers can beemployed for simulation driven design as well as designoptimization.
OptiStruct: Design and optimization softwareusing finite elements and multibody dynamics
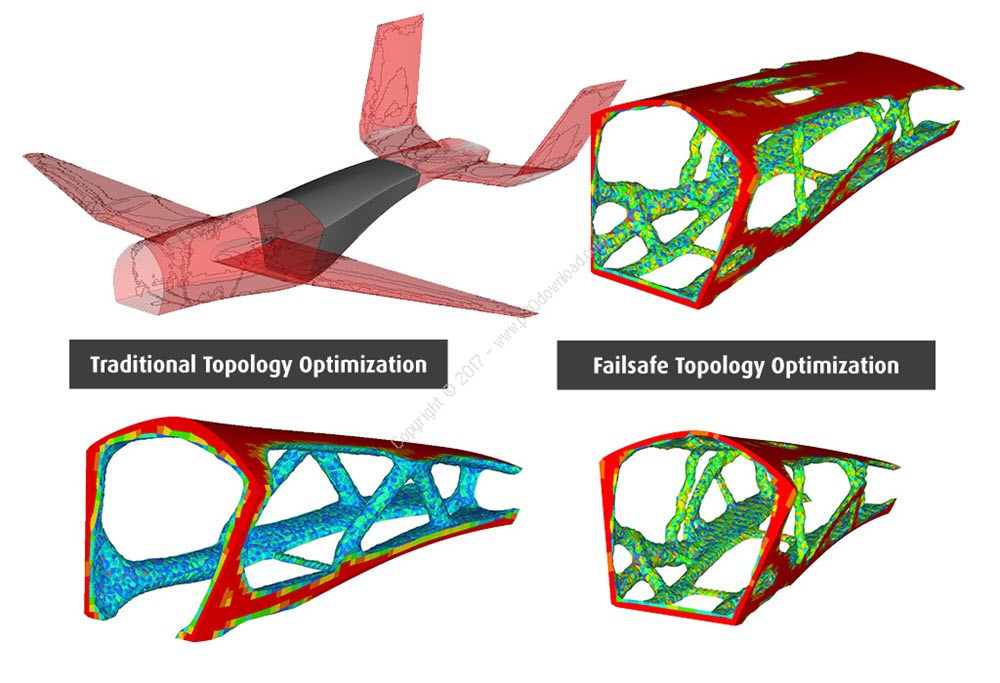
Altair OptiStruct is an industry proven, modern structural analysissolver for linear and non-linear mechanical problems under static,dynamic, and thermal loads. It is the market-leading solution forstructural design and optimization. Based on finite-element andmulti-body dynamics technology, and through advanced analysis andoptimization algorithms, OptiStruct helps designers and engineersrapidly develop innovative, lightweight and structurally efficientdesigns. OptiStruct is used by thousands of companies worldwide toanalyze and optimize structures and mechanical systems forstrength, durability, noise and vibrations, heat transfer, as wellas impact.
RADIOSS: Finite element solver for linear andnonlinear problems
Altair RADIOSS is a leading structural analysis solver for highlynon-linear problems under dynamic loadings. It is highlydifferentiated for scalability, quality and robustness, andconsists of features for multiphysics simulation and advancedmaterials such as composites.
RADIOSS is used across all industries worldwide to improve thecrashworthiness, safety, and manufacturability of structuraldesigns. For over 25 years, RADIOSS has established itself as aleader and an industry standard for automotive crash and impactanalysis.
In the RADIOSS 2017 release, physics modeling capability has beenexpanded to include additional advanced material and failure laws.Improved simulation driven innovation was enabled by improvementsto solver robustness and accuracy and strong ties to optimization.Computation performance has been improved such that 16300+ corescould be used to simulate a 10 million element full vehicle model.RADIOSS has become even easier to use with the addition of newautomated ways to handle poor solid element quality and contactinitial intersections. Ease of use was improved with new compositemodeling input that better matches the manufacturing process.
MotionSolve: Multibody dynamics solver
Improved workflow for co-simulation using Simulink CoderTM
The workflow for co-simulation between MotionSolve and Simulink®via the Simulink CoderTM has been revised for ease of use. In thecurrent version, you can make use of a script to compile yourSimulink CoderTM model into a dynamic linked library.
Faster simulation times while using SI1
The solver has been enhanced to provide faster simulation timeswhen using the DSTIFF integrator with DAE index 1(Stabilized Index1). The scaling of the Jacobian terms corresponding to constraintequations has been modified. This has resulted in faster simulationtimes for SI1. Speed improvements between 10-15% are seen onaverage.
Enhanced gravity modeling
The Force_Gravitymodeling element can now be specified as a function expression aswell as a real number. This allows you to model gravity as afunction of time in your model.
Python user subroutine library
In this release, MotionSolve provides a library of user subroutineswritten in Python for your reference. These can be accessed at<altair_root>hwsolversmotionsolveusersubpy_src.
Improved error messages
The solver error messaging has been improved in some areas. Thisenables you to better understand what the solver is doing and itallows you to more easily debug your model. Some of theseinclude:
– Improved error messages if non-matching parenthesis are detectedin any function expression
– More understandable messages when redundant constraints aredetected in the model
– More understandable messages when a U or V parameter goes out ofrange in a PTCV, PTdCV, PTSF, PTdSF etc. modeling element
– More understandable messages when a negative stiffness or dampingvalue is specified for a spring damper or bushing modelingelement
Modeling check for spring damper, bushing, beam and fieldelements
Previously, if you specified I and J markers belonging to the samebody for the above model elements, MotionSolve would fail duringthe analysis with little information about the cause. This madedebugging the model difficult. Within this release, a mechanismthat checks this condition has been implemented. If the I and Jmarkers for the above elements belong to the same body, a relevanterror message is printed out and the simulation is stopped.
Visualizing rigid body contact
With this release, the default setting for visualizing rigid bodycontact forces in HyperView has changed. Now, if rigid body contactis modeled, MotionSolve will always write out rigid body contactinformation allowing you to visualize the contact force vectors inHyperView. To turn this feature off, you may modify thecontact_gra_output attribute within the ResOutput command.
Automotive Extensions to the Solver
MBD – Vehicle Dynamics Tools
The MBD – Vehicle Dynamics Tools in MotionSolve and MotionView area set of modeling entities for bushings, bump-stops, dampers,rebound-stops, springs and tires that extend the capabilities ofMotionSolve
Installer Size: 2243 MB
Download Links : Altair HyperWorks Solvers v2017.1.1 x64 with Help + Crack